내 차는 사실
나 혼자 제어 하지 않는다?
나 혼자 제어 하지 않는다?
2024.03.08
내가 운전을 잘해서가 아니라고?
운전을 하다 보면 도로 위에서 정말 많은 일이 일어나죠. 때로는 급격한 스티어링 휠 조향을 통해 무언가를 피해야 하는 상황이 생길 수도 있습니다. 이럴 때, 내 차가 안전하고 정확한 조향을 도와준다는 사실을 아시나요? 이것을 위해서는 ESP라는 장치가 핵심이라고 하는데요. 지금부터 마이클과 함께 자세히 알아봐요!
스스로 판단해서 개입하는
능동형 안전장치, ESP
능동형 안전장치, ESP

먼저, ESP가 무엇인지를 알아야겠죠.
ESP(Electronic Stability Program)는 전자식 차체 자세 제어장치입니다. 이 장치는 자동차 제조사마다 부르는 명칭이 DSC, ECS 등으로 다양하지만 기본적인 작동 원리는 비슷합니다.
ESP(Electronic Stability Program)는 전자식 차체 자세 제어장치입니다. 이 장치는 자동차 제조사마다 부르는 명칭이 DSC, ECS 등으로 다양하지만 기본적인 작동 원리는 비슷합니다.
그리고 차체 자세 제어장치라는 이름에서 알 수 있듯이 차체의 자세를 안정적으로 잡아주는 기능을 하는데요.

운전자가 스티어링 휠을 조작한 각도와 실제 차량의 속도, 미끄러짐, 회전 상태를 수십분의 1초 단위로 분석하여, 만약 스티어링 휠을 조작한 만큼 차량이 나아가고 있지 않다면 운전자의 의도대로 차량이 조향 될 수 있도록 차량의 진행 방향을 제어합니다.
ESP는 어떻게 방향을 조정할까?
ESP는 브레이크와 구동력을 제어하는 ABS나 TCS 등을 모두 총괄하는 상위 장치입니다. 그렇기에 ESP는 휠 스피드 센서나 조향각 센서 등 다양한 센서를 통해 차량의 현재 상태를 전체적으로 파악하고, 상황에 맞게 각 바퀴의 브레이크와 구동력을 제어합니다.
그렇다면 ESP가 개입하는 대표적인 상황은 어떤 것이 있을까요?
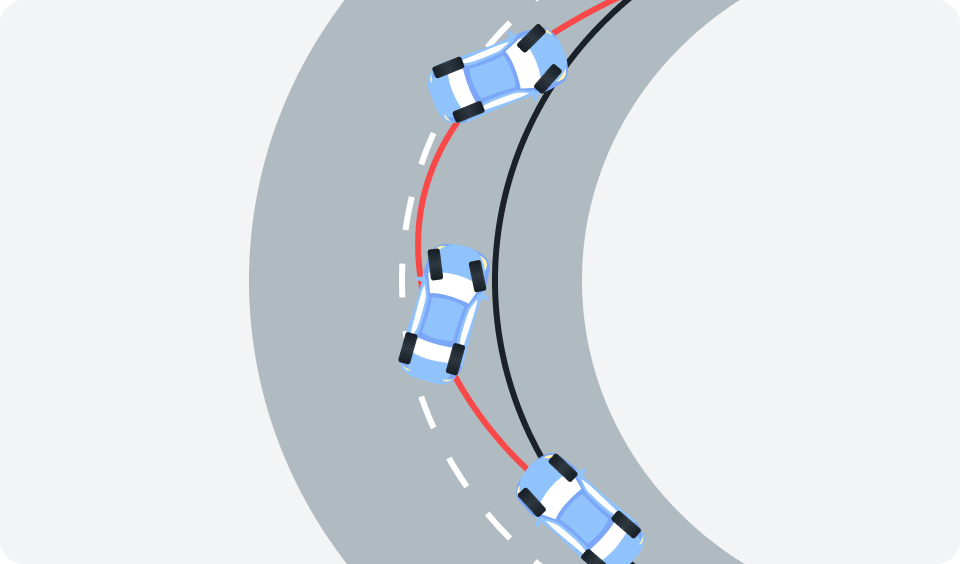
1. 조향한 것만큼 돌지 않는 상황
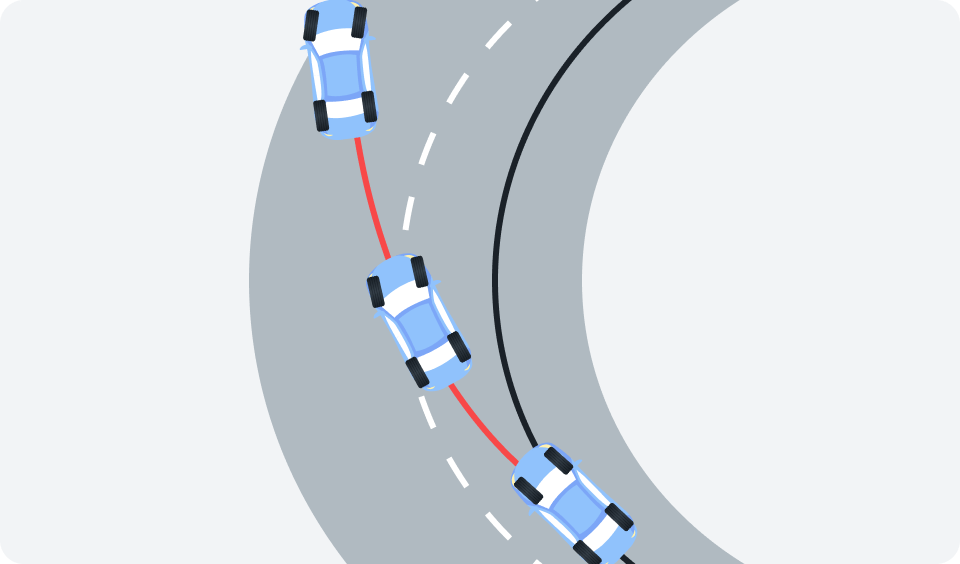
운전자가 스티어링 휠을 조향한 것보다 덜 회전하는 상태를 언더스티어(Understeer)라고 합니다. 언더스티어는 일반적으로 앞타이어가 뒷 타이어보다 접지력이 좋지 않을 때 발생하는데요. 즉, 앞바퀴가 미끄러지고 있는 상태입니다.
이때, ESP는 운전자가 가고자 하는 쪽의 뒷바퀴에 제동을 걸어서 회전력을 증가시키는데요. 결과적으로 운전자가 의도했던 만큼 차량이 진행될 수 있도록 도와줍니다.
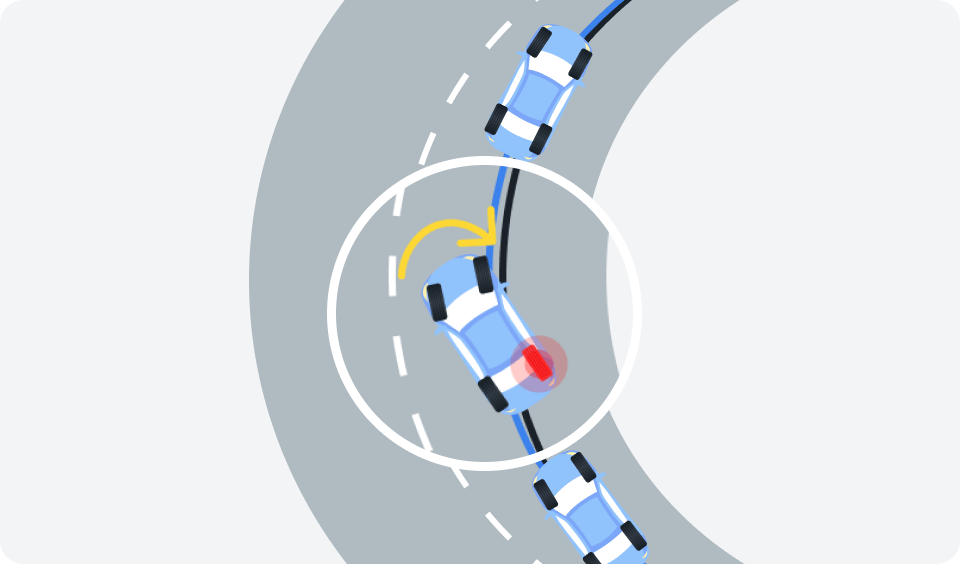
2. 조향한 것보다 더 도는 상황
운전자가 스티어링 휠을 조향한 것보다 더 안쪽으로 파고드는 상태는 오버스티어(Oversteer)라고 합니다. 뒷바퀴가 접지력을 잃고 미끄러지고 있는 상태인데요. 위에 소개해드린 언더스티어의 반대 상황이라고 생각하시면 됩니다.

뒷바퀴를 미끄러트리며 주행하는 드리프트(Drift) 모터스포츠 기술이 바로 이 오버스티어 상태를 이용한 것이죠.
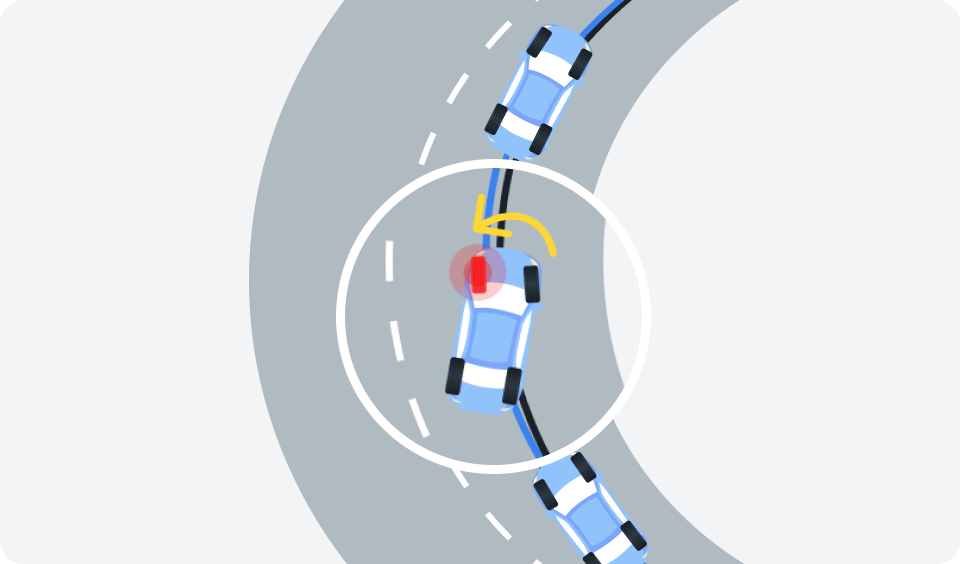
하지만, 일반적인 주행 중에 이처럼 뒷바퀴가 미끄러진다는 것은 차가 스핀 할 수 있는 위험한 상태를 말하는 것이기에 ESP가 개입하는데요. 언더스티어를 제어할 때와는 반대로, 가고자 하는 방향의 반대쪽 앞바퀴에 제동력을 줍니다. 이를 통해 반대쪽으로 도는 회전력을 만들어서 안쪽으로 너무 많이 돌지 않도록 하는 것입니다.
그런데 ESP를 꺼야하는 상황이 있다?

안전을 위해서 ESP는 항상 켜져 있어야 합니다. 그런데 특정 상황에서는 잠시 끄는 것이 오히려 도움된다고 하는데요. 바로 눈이나 진흙 등 험로에 빠져 바퀴가 헛돌고 있는 경우입니다.
정지 상태에서 험로를 탈출하고자 할 때는, TCS가 바퀴가 미끄러지고 있는 것으로 판단하여 정상적인 동력 전달을 방해합니다. 그래서 TCS를 끄는 것이 험로 탈출에 도움이 되는 것인데요.

일반적으로 ESP를 끄면 TCS도 함께 꺼지는 경우가 많기 때문에, 험로를 탈출할 때는 ESP를 잠시 꺼두시는 것을 추천드립니다.
안전장치는 언제나 최후의 보루!

최근 들어 자동차에 탑재된 안전장치들이 발전하면서 더욱 안전한 차량 운행이 가능해졌죠. 그렇지만 완전 자율주행 시대가 오지 않은 아직, 각종 주행 안전장치들은 어디까지나 보조수단입니다.
그렇기에 안전장치보다도 운전자의 안전한 차량 운행이 더 중요하다는 것을 항상 기억해주세요!